Ⅰ. The concept of robots.
Robots have coexisted with human society for decades. The robot referred to here does not just refer to a human-looking, talking robot design, but a man-made machine device that can automatically perform tasks to replace or assist humans. The work is usually an electromechanical device controlled by a computer program or electronic circuit. They are the machines that work behind the scenes and are responsible for making many of the products we use in our daily lives. Robots are responsible for a wide range of application fields, including industry, military, medical, education, entertainment, exploration, etc. Next, we will focus on the application of robots in industry.

Ⅱ. Difficulties encountered in industrial robot design.
Industrial robots are relatively low-intelligent by today’s standards, but they serve an important purpose. They are designed to perform the same tasks repeatedly and with high accuracy. The automotive industry has been using industrial robots for more than half a century. They perform dangerous jobs such as welding, painting and assembly.
Creating connector solutions for industrial robots can be a headache for manufacturers, and one of the key considerations is reliability. When we describe a connector, we often use the mating cycle as a key indicator of its service life. Mate cycles are defined as the Inserting and unplugging behavior of a connector, and most manufacturers publish the minimum expected number of mating cycles of each type as a measure of their reliability.
It would not be surprising if the actual performance of the connectors varied greatly as they were used. In a clean and comfortable environment, a connector can last far longer than necessary if used correctly by an experienced technician. Conversely, if a connector is used in harsh field conditions and is frequently unplugged in a hurry, the user may find that its service life is much shorter than expected. This can easily happen when we see factory floors where industrial robots must perform tasks.
Another issue faced when designing for robots is motion. Robots move quickly, often in multiple directions, for hours or even days. All parts of a robot—its arms and appendages—need to be connected to each other to provide the data, power, and signals they need to work. Every moving joint is a designer’s problem.
Ⅲ. Industrial connector reliability design and testing.
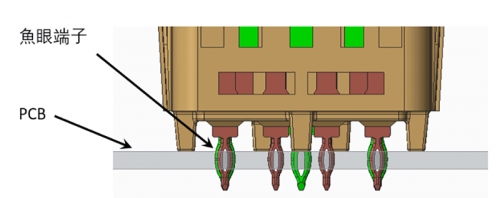
When designing for robots, the structure inside a connector is core to its performance. Most of us are familiar with connector designs that use terminals in a traditional plug and receptacle arrangement. This has been with us for a long time as it provides one of the best ways to connect two circuits.
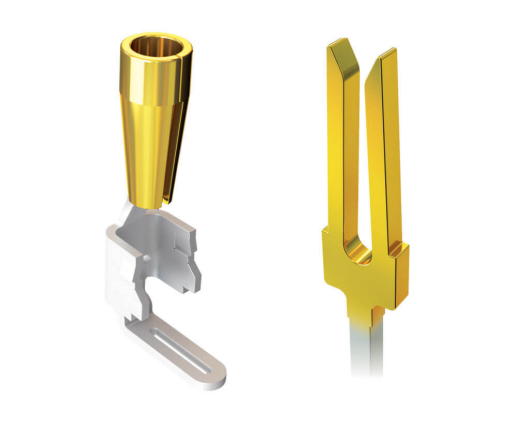
The concept of traditional terminal and socket design is to insert a fixed terminal into a slightly smaller socket. The socket bends sufficiently to allow the terminals to enter and create a spring force to ensure contact between the two halves.
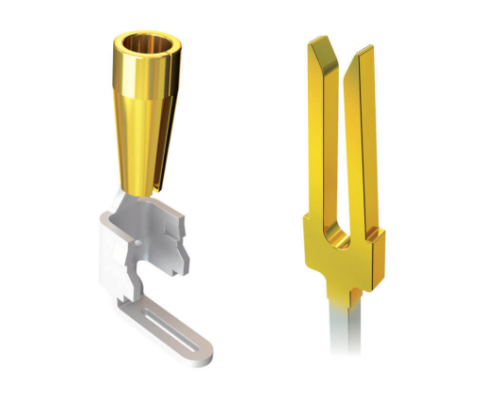
One of the advantages of this design is that the pin terminals are relatively easy to fabricate. Terminals can be solid, machined from solid bar stock, or hollow, made from flat sheet metal rolled or formed into a three-dimensional shape. Although different manufacturing techniques have their own advantages, in this case the important point is that the terminal itself is fixed.
Socket terminals provide a flexible element to the design. The socket is slightly smaller than the pin, so some flexibility is required to accommodate it. As the socket expands to accommodate the pins, it exerts positive pressure on the pins. This is important to ensure good electrical contact between the mated halves and to reduce the effects of vibrations that may occur during normal use.
However, positive spring pressure creates other problems. To overcome the spring resistance, forces need to be applied to engage and disengage these terminals, known as insertion and extraction forces respectively. While the force required for a small number of terminals is negligible, the situation is different when we consider connectors with many circuits. To successfully mate such a connector, a large amount of force needs to be applied, so the operator must ensure the connectors are properly aligned.
Ⅳ. Risks of Industrial Connector Cables
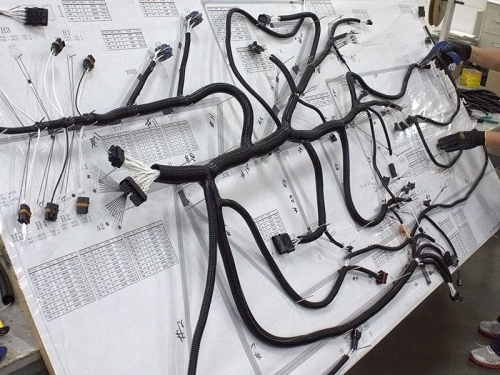
Cables also present risks when used in industrial robots. When designing for robots, cables need to be protected to ensure they don’t bend past their built-in limits or twist in cumbersome ways. Even if this could be done, the cable is still made of metal, albeit with very thin wires braided together to create a flexible cable. As we have seen many times in history, metal failed. The constant movement of the cable itself can weaken the conductor, seriously affecting its performance and compromising its reliability, even before the cable actually breaks.
However, with repeated movements, the cable will eventually break, at which point the connector will become extremely important as the cable will need to be removed and replaced. There are some very impressive cables out there that offer longer operating life, as do high-reliability connectors. I remember I had a multi-core cable that was so soft it felt like a piece of cooked spaghetti. But eventually, even such cables will fail from repeated use.
Perhaps the biggest headache when designing for a robot is the power supply. Modern battery technology is now more capable than ever, thanks in large part to the automotive industry. However, the battery needs to be charged, and until some clever engineer figures out a way to deliver massive amounts of power over a Bluetooth link, the connector won’t be viable.
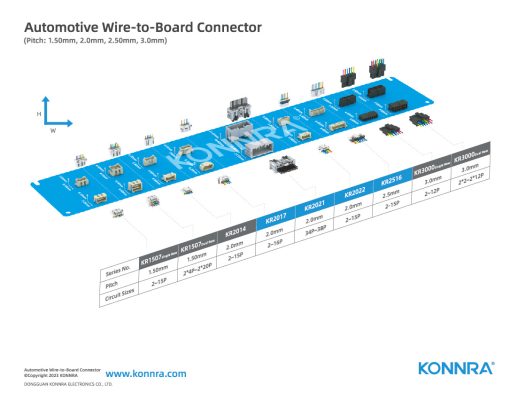
In the future, robots will replace more human jobs. Konnra will continue to innovate in the supply of back-end connectors and provide more high-reliability electronic connectors. For the latest products, visit our Smart Robot Applications page, where we explore the world of industrial automation and robotics.